Google Classroom
GeoGebra
GeoGebra Classroom
Sign in
Search
Google Classroom
GeoGebra
GeoGebra Classroom
Outline
MMT: Synthesis of Mechanisms
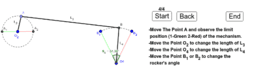
Synthesis of two angular follower's position with no quick return for a rocker's path ϴ4
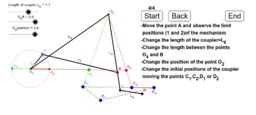
Synthesis of two angular positions with no Quick Return
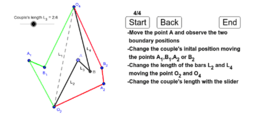
Synthesis of two positions for the coupler
Synthesis of a four bar for 3 posess
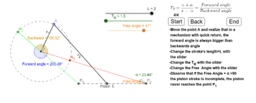
Synthesis of two angular position follower with Quick Retu
Synthesis of a slider crank with quick return
Synthesis of a Double 4-bar Quick Return
Synthesis of a 6 bar quick return slider crank
Synthesis of a Quick Return Mechanism
Synthesis of trajectory generation for 3 points in specified
Synthesis of 4 bar for 3 coupler's points
Single dwell with dyad
Single Dwell Mechanism with slider
Double rocker mechanism with dyad
MMT: Synthesis of Mechanisms
Author:
Andereguillor
Synthesis of two angular follower's position with no quick return for a rocker's path ϴ4
Synthesis of two angular positions with no Quick Return
Synthesis of two positions for the coupler
Synthesis of a four bar for 3 posess
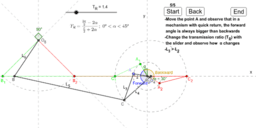
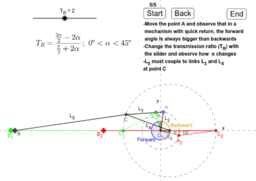
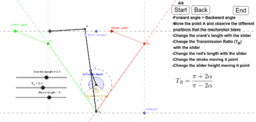
Synthesis of two angular position follower with Quick Retu
Synthesis of a slider crank with quick return
Synthesis of a Double 4-bar Quick Return
Synthesis of a 6 bar quick return slider crank
Synthesis of a Quick Return Mechanism
Synthesis of trajectory generation for 3 points in specified
Synthesis of 4 bar for 3 coupler's points
Single dwell with dyad
Single Dwell Mechanism with slider
Double rocker mechanism with dyad
Next
Synthesis of two angular follower's position with no quick return for a rocker's path ϴ4
New Resources
Average Rate of Change: Graph a Function (2)
Construct a Conic
Poorly Drawn Parallelograms
Quiz: Finding Average Rate of Change
Poorly Drawn Parallelograms 3
Discover Resources
degrees in a triangle
Scalar Multiplication of a Vector - LAFS
Indonesia 2016
Point-Slope Problem Generator v2021
Option A
Discover Topics
Statistical Characteristics
Logarithmic Functions
Hyperbola
Random Experiments
Percentages